That is the position of an encoder, or a very different schedule that estimates the rotor angle from motor electrical measurements. PID is there only to shore up effectiveness, it isn't really a important element of commutation in any perception. $endgroup$
The issue is usually that if the robot is not transferring, the wheels/motors can nevertheless go considering that they act like free of charge wheels when no energy is applied which is lousy If your robot stops in slope or if someone tries to pull/press the robot because it could be effortlessly moved.
I agree, we've been without having a little something such as this for also prolonged Sticky-ing It will be wonderful; it is a bit sparse at the moment but we will proceed to flesh it out a lot
Olin LathropOlin Lathrop 316k3636 gold badges445445 silver badges932932 bronze badges $endgroup$ 2 $begingroup$ Actually the inductance of your winding hold The present flowing if the PWM is inside a "off" cycle. So it isn't really similar to the motor generates pulsing torque and receives filtered out from the mechanic, but it's filtered out because of the electrical residence in the motor by itself.
1 $begingroup$ In which conditions are your motors no cost wheeling ? Your suggestion can be done provided that the robot is ON but I suppose your dilemma is when it is OFF (no much more electricity out there: accu taken out or vacant batteries), is just not it ? $endgroup$
You've answered both equally of my queries. As a make any difference of point You can find 2 options in VESC - "Max. motor recent" was set to 140A, having said that I've needed to Choose an "Absolute Highest Present" of 180A to avoid below-voltage glitches. $endgroup$
In that case the unloaded latest will be even decrease considering the fact that there is absolutely no friction from the brushes to beat. Which allows less present to push the motor at a certain pace, that may be closer to in which the generator voltage matches the external utilized voltage.
FOC would not must measure section voltage/back again-emf in any way. In its easiest type, you might be just working out where the rotor magnets are relative for the stator (the all crucial electrical angle) then environment 3 voltage degrees that can optimally generate torque at small worm gear motor that angle.
Im unsure I have an understanding of this sentence, but It appears to me like you think that The one thing FOC will take care of is the phase, do you think you're disregarding the amplitude?.
The situation will likely be to style the controller to simply accept the returned Vitality and dissipate it or return it to the power resource. That will require an influence electronic circuit over the DC side with the PWM controller.
- Be sure the throttle variety has long been calibrated correctly In case your ESC involves it. Check the Guidance for particulars with your specific ESC.
Sorry, your regular warranty system was eliminated for the reason that these strategies are at this time only readily 12v DC motor available for one-item orders.
I have recognized that There are several overwhelmingly popular problems that people have with brushless units, significantly for many who are new to establishing their unique tools.
It could be related on top of things loops that exist outside of FOC, but it It truly is canonical form the one feedback mechanisms/exterior measurements that are created are The present of your motor phases, plus the angle in the rotor with regard to the stator. $endgroup$
Celebrity Then and Now
 Destiny’s Child Then & Now!
Destiny’s Child Then & Now!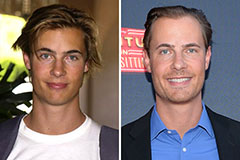 Erik von Detten Then & Now!
Erik von Detten Then & Now! Michelle Trachtenberg Then & Now!
Michelle Trachtenberg Then & Now! Lucy Lawless Then & Now!
Lucy Lawless Then & Now! Dawn Wells Then & Now!
Dawn Wells Then & Now!